
Kunho Kim
AI Researcher [AT] NC AI
kkh23834022 [AT] gmail.com
CMTP
Predict the trajectory of the vehicle using deep learning (Deep Learning)
2020 Fall KAIST Introduction to Artificial Intelligence Project
In this work, we develop a model that predicts the trajectory of the vehicle using deep learning. We propose the Context-Aware Multi-agents Trajectory Prediction model called CMTP.
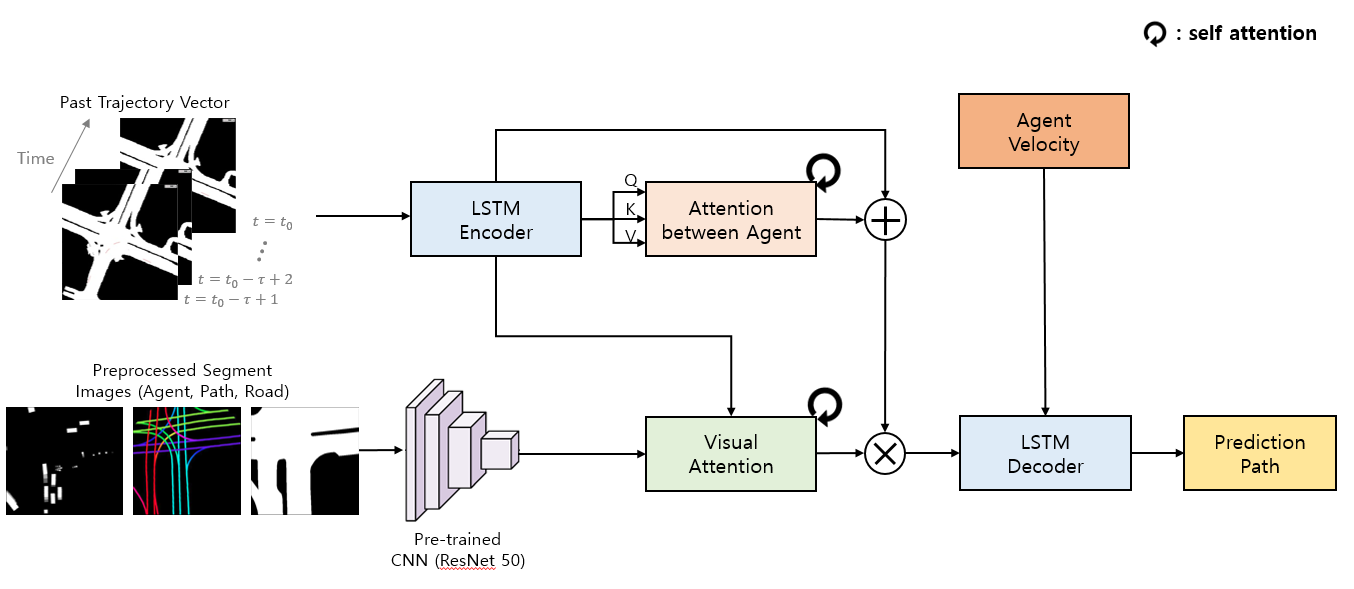
While a vanilla trajectory prediction aims to predict a path for an agent, Multimodal Trajectory Prediction model predicts multiple paths at the same time [1]. This was the paper that we started with and was one of the baseline for our study. Yet, there are two big problems of the model. First is that since the model architecture is too simple, it does take the context into account. Therefore, it tends to produce predictions which sometimes are not plausible. Also the loss function optimizes only the best path among multiple trajectories which makes other trajectories more non-plausible. Through our model we tried to overcome these problems by changing loss function and using more complex model. In summary, our achievements are:
- We introduce a novel architecture to predict the best path possible.
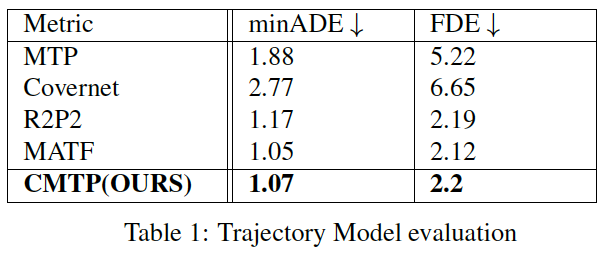
- We achieved comparable performance in the nuScenes [2] dataset.
Quantitative Evaluation
References
[1] Henggang Cui et al. Multimodal Trajectory Predictions for Autonomous Driving using Deep Convolutional Networks, ICRA 2019.
[2] Holger Caesar et al. nuScenes: A multimodal dataset for autonomous driving. CVPR 2020.